
Robotic Explorers of Mars
There have been many successful rovers sent to explore the surface of Mars. This is a brief look at those successful mission. The trip is long, it takes about 6 months for robots to travel to Mars. Perseverance traveled almost 300 million miles to reach Mars. After robotic missions successfully attain orbit around Mars, they must automatically perform entry, descent and landing. This is a term that actual has an acronym that is frequently used: EDL. This automated landing process strikes fear in the hearts of mission controllers because the spacecraft is blocked from communicating for several minutes.
Mars Pathfinder Sojourner Rover
Launch Date: December 4, 1996
Mars Landing: July 4, 1997
Landing Site: Chryse Planitia
End of Mission: September 27, 1997
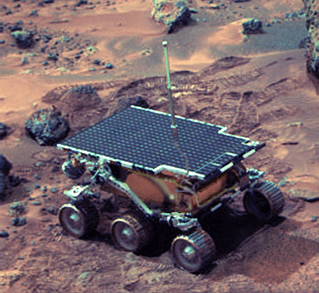
Sojourner was the first successful rover sent to the red planet. When it landed on July 4, 1997, the website at NASA was overwhelmed by the millions of hits it received and thus, Sojourner set off a new era in internet site management.
Sojourner was built during that era at NASA when budget cuts and mission failures plagued the agency. Development took three years and cost less than $150 million for the lander, and $25 million for the rover. The mission was developed faster and cost less than previous missions. Significantly, these numbers show that the Sojourner rover's landing platform was the brains and the heart of this mission. Sojourner rover was a technology demonstration, a small additional project that could prove robotics could be used successfuly on Mars.
And what about that landing? What a chance mission planners took when they decided to send the rover and its expensive lander equipment down to the surface of Mars wrapped in air bags! Really, the rover and lander bounced across the surface of Mars until they came to a stop somewhere on the surface. Of course the concept was tested thoroughly on Earth before a commitment to land on Mars in this fashion was made.
Using airbags to deliver hardware on the surface of Mars airbags was a success and NASA used them on the next generation of Mars Rovers, the MER program rovers Spirit and Opportunity. The last two rovers sent by NASA were too large to land in this fashion.
The Mars Pathfinder mission was launch shortly before the death of Mars enthusiast, Carl E. Sagan. Sagan was well know for his highly successful astronomy series, Cosmos. He was the David Duncan Professor of Astronomy and Space Sciences and director of the Laboratory for Planetary Studies at Cornell University. In honor of his passing, the Pathfinder landing site was renamed, Carl Sagan Memorial Station.
Sojourner and the Pathfinder lander returned ~2.6 gigabits of information. Pathfinder returned more than 16,000 images including 550 from the Sojourner rover. Although the rover only traveled on the surface of Mars for 330 feet or 100 me, it helped to pave the way for the two Mars Exploration Rovers, Spirit and Opportunity. The air bag method used to deliever Pathfinder to the surface worked for the twin MER rovers as well.

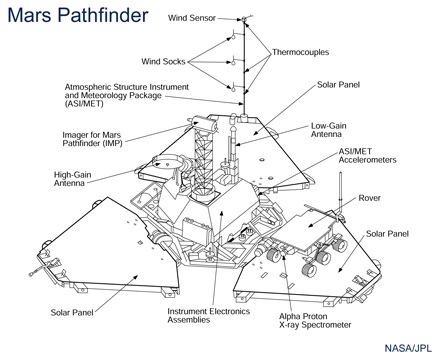
Mars Pathfinder lander
While the technology demonstration, Sojourner Rover captured the hearts of the public, the "real" mission objectives were to be made by the lander.
Instruments
Lander
Imager For Mars Pathfinder (IMP)
IMP instrument used two cameras, mounted on the rover's mast to provide a stereo imaging system. It used various filters to provide color capability. The camera's stereo images allowed the rover to navigate over the surface of Mars.
Atmospheric Structure Instrument/Meteorology Package (ASI/MET)
The ASI/MET measured the Martian atmosphere and an accelerometer used as Pathfinder descended to the surface. Other sensors on the lander measured pressure, temperature, and wind, recording weather at the landing site during the mission.
Rover
APXS Deployment Mechanism
The deployment mechanism was used to place the APXS instrument in various positions above the ground to study soil and rocks.
Alpha Proton X-Ray Spectrometer (APXS)
APXS was spectrometer designed to determine the elements in the rocks and soil on Mars. As the rover carried the instrument to various locations on the surface of Mars, the instrument measured the amount of various elements present in the sample rock or soil.

Mars Exploration Rovers (MER)
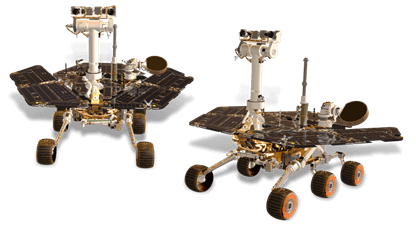
The twin rovers sent on the Mars Exploration Mission are Spirit and Opportunity. The rovers were named by a 9-year-old girl, Sofi Collis, who wrote a winning essay in the rover naming contest. The primary surface mission for MER rovers was planned to last at least 90 sols (martian days). Spirit operated for 6 years and Opportunity for a record 15 years! (That's Earth years.)
Because of the massive amount of information returned from Mars by both rovers, two asteroids were named in their honor: 37452 Spirit and 39382 Opportunity.
The scientific objectives of the Mars Exploration Rover mission
Search for and characterize a variety of rocks and soils that hold clues to past water activity. In particular, samples sought will include those that have minerals deposited by water-related processes such as precipitation, evaporation, sedimentary cementation or hydrothermal activity.
Determine the distribution and composition of minerals, rocks, and soils surrounding the landing sites.
Determine what geologic processes have shaped the local terrain and influenced the chemistry. Such processes could include water or wind erosion, sedimentation, hydrothermal mechanisms, vulcanism, and cratering.
Perform calibration and validation of surface observations made by Mars Reconnaissance Orbiter instruments. This will help determine the accuracy and effectiveness of various instruments that survey Martian geology from orbit.
Search for iron-containing minerals, identify and quantify relative amounts of specific mineral types that contain water or were formed in water, such as iron-bearing carbonates.
Characterize the mineralogy and textures of rocks and soils and determine the processes that created them.
Search for geological clues to the environmental conditions that existed when liquid water was present.
Assess whether those environments were conducive to life.
Spirit also known as MER-A (Mars Exploration Rover – A) or MER-2
Launch Date: June 10, 2003
Mars Landing: January 4, 2004
Landing Site: Gusev Crater
End of Mission: March 22, 2010
Spirit was the first rover to be constructed for the Mars Exploration Mission and so was the one that gave engineers the most issues to deal with. After Spirit's systems were worked out, its twin Opportunity had the benefit of the engineer's experience. Thus, Spirit was also the MER rover that had the most issues on the planet Mars. In March 16, 2006 its right-front wheel stopped spinning. NASA engineers were dragging the wheel, sometimes even driving the rover backward. Finally, Spirit got stuck on Mars at a location that was named Troy by NASA. It was used for another year until a Mars dust storm took out its battery in 2010. Spirit Rover traveled 4.8 miles or 7.7 km exploring Mars.
Opportunity also known as MER-B (Mars Exploration Rover – B) or MER-1
Launch Date: July 8, 2012
Mars Landing: January 25, 2004
Landing Site: Meridiani Planum
End of Mission: June 10, 2018
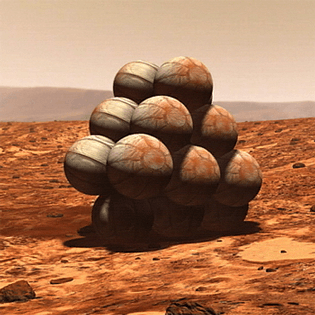
Opportunity rover also had the nickname, Oppy. As its twin Spirit, struggled with its barren landing area on Gusev crater, Opportunity landed in a fantastic spot to explore Mars. Within the first month, Opportunity rover spotted round, iron-rich concretions that were nicknamed "blueberries". It is thought that the blueberries had to have originated in a watery environment because they contain hematite. Opportunity also cut open some of the spheres with its Rock Abrasion Tool instrument. There is much debate on the true meaning of the rover's discovery.
Opportunity traveled Meridiani Planum for 14 years and 46 days (in Earth time). Its last contact with NASA came on June 10, 2018, after the rover had traveled a distance of 28 miles or 45 km. It seems hard to believe that record could be broken. Both Opportunity and Spirit had the benefit of Mars "cleaning events" where intense martian winds cleared their solar panels of dust, allowing their solar panels to produce the energy they required to continue exploring the distant martian shore.
Mars Exploration Rovers Instruments

RAT – the only rats on Mars today
The Rock Abrasion Tool on the Mars Exploration Rovers, Spirit and Opportunity, is known as the "RAT". RAT was a drill that used wheels of diamond dust and resin to grind Martian rocks. The RATs completed hundreds of grinds. The RAT's rotating, grinding teeth gnawed into the surface rock to reveal fresh mineral surfaces for analysis by the rover's scientific tools.
Opportunity's tool remained fully operational over a decade after the rover landed.
Panoramic Camera (Pancam)
Two cameras take detailed, 3-D panoramic pictures of the Martian landscape surrounding the rover multi-wavelength.
Microscopic Imager (MI)
The high-resolution camera for magnifying Martian rocks and soils. It was used to find promising targets for more closer study and analysis by other instruments on the rover. The MI instrument is mounted on the end of the robotic arm on each of the rovers.
Miniature Thermal Emission Spectrometer (Mini-TES
Mini-TES measures the different spectrums of infrared light, or heat, emitted from different minerals in rocks and soils. Mini-TES is designed to look for minerals formed in water.
Mössbauer Spectrometer (MB)
MB determines the makeup and quantities of iron-bearing minerals in geological samples. The MB instrument can be placed right on rock and soil samples for close-up study. MB was also used to examine magnetic dust samples collected by the magnetic array on the rover's deck.
The Alpha Particle X-Ray Spectrometer (APXS)
The APXS reveals the elemental chemistry of rocks and soils by testing how various materials respond to X-ray radiation and alpha particles. Most APXS measurements are taken at night because it requires at least 10 hours of accumulation time. Examined separately, X-rays require only a few hours.
Mars Science Laboratory
Curiosity
Launch Date: November 26, 2011
EDL: August 5, 2012
Landing Site: Gale Crater
Mission: Ongoing
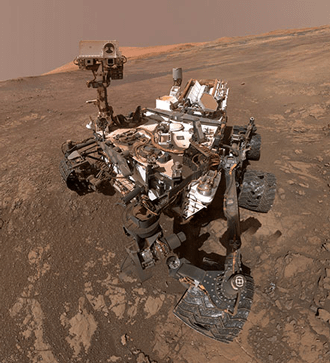
Curiosity is about the size of a small SUV — 10 ft. long (not including the arm), 9 ft. wide and 7 ft. tall or ~3 m x 2.7 m 2.2 m. The mass of the rover is 899 kg, that means it it weights 1,982 lbs in Earth gravity and 743 lbs. in Mars gravity. Its robotic arm is bristling with instruments and can reach about 7 ft. or 2.2 m.
The selfie image of Curiosity at Vera Rubin ridge is a mosaic was assembled from many images taken by Curiosity's Mars Hands Lens Imager (MAHLI) on the robotic arm. The images were acquired on January 23, 2018, during Curiosity's Sol 1943. They are put together so that the arm is not shown in the picture. Curiosity is preparing to move up the ridge behind it. Right behind the Mast where many cameras and other instruments are mounted, looming in the background is Mount Sharp in the center of Gale crater. NASA released the image in a press release on February 8, 2018: Mount Sharp 'Photobombs' Curiosity.
- Find out more at Astra's about Curiosity Rover
Mars 2020
Perseverance
Launch Date: July 30, 2020
EDL: February 18, 2021,
Landing Site: Jezero Crater
Mission: Ongoing
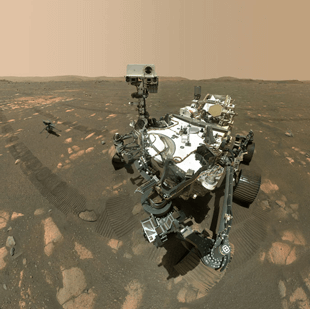
The largest rover NASA ever launched to Mars, the Perseverance rover weighs 2,260 lbs or 1,025 kg on Earth. Perseverance, also called "Persy" is based on theCuriosity rover's configuration. Persy inherited technological innovations already demonstrated by its older couterpart, especially the entry, descent, and landing system or the EDL system. The landing system includes a parachute, descent vehicle, and the "skycrane", a special vehicle that lowers the rover on a tether to the surface during the final seconds before landing.
Perseverance is different because it is gathering Mars soil samples and caching them on the surface of Mars in preparation for a sample return mission. Another difference between Perseverance and Curiosity, is that Persy carried in its belly, a small helicopter, named Ingenuity. The first vehicle to achieve flight on Mars, Ingenuity has been very successfully flying on Mars and keeping up with the Rover on its travels across the martian surface.
- Find out more at Astra's about Perseverance Rover
China's Tianwen Mars Mission
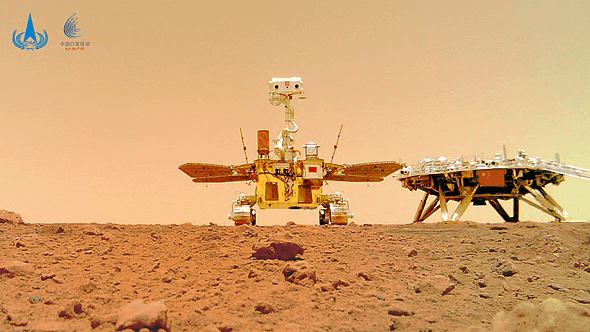
Zhurong
Launch Date: July 23, 2020
EDL: May 14, 2021
Landing Site: Utopia Planitia
Mission: Ongoing
On May 14, 2021, the Tianwen-1 lander successfully landed at Utopia Planitia in the northern part of the on Mars
- Find out more about Tianwen on Astra's Mars 2020 page
Navigate Astra's Guide to Mars Exploration:
3 Faces of Mars Home | Mars Orbital Explorers | Mars 2020 | Mars Rovers | Curiosity Rover | Perseverance Rover
This webpage is ©2023 D. E. Jenkins all rights reserved. Please use the contact page to get permission to use this content or to send comments or corrections.